院新闻网讯(通讯员 曾宪森)近日,我院许志伟博士团队最新研究成果论文《Multi-objective Optimization for Multimodal Multi-objective Multi-point Shortest Path Problem Considering Unforeseeable Road Eventualities》在国际权威期刊《IEEE Transactions on Intelligent Transportation Systems》(CCF-B类)上正式发表。许志伟博士为该论文的第一作者、通讯作者,英国伯明翰大学李密青教授、西班牙巴斯克大学Javier Del Ser教授共同参与了此项重要研究。
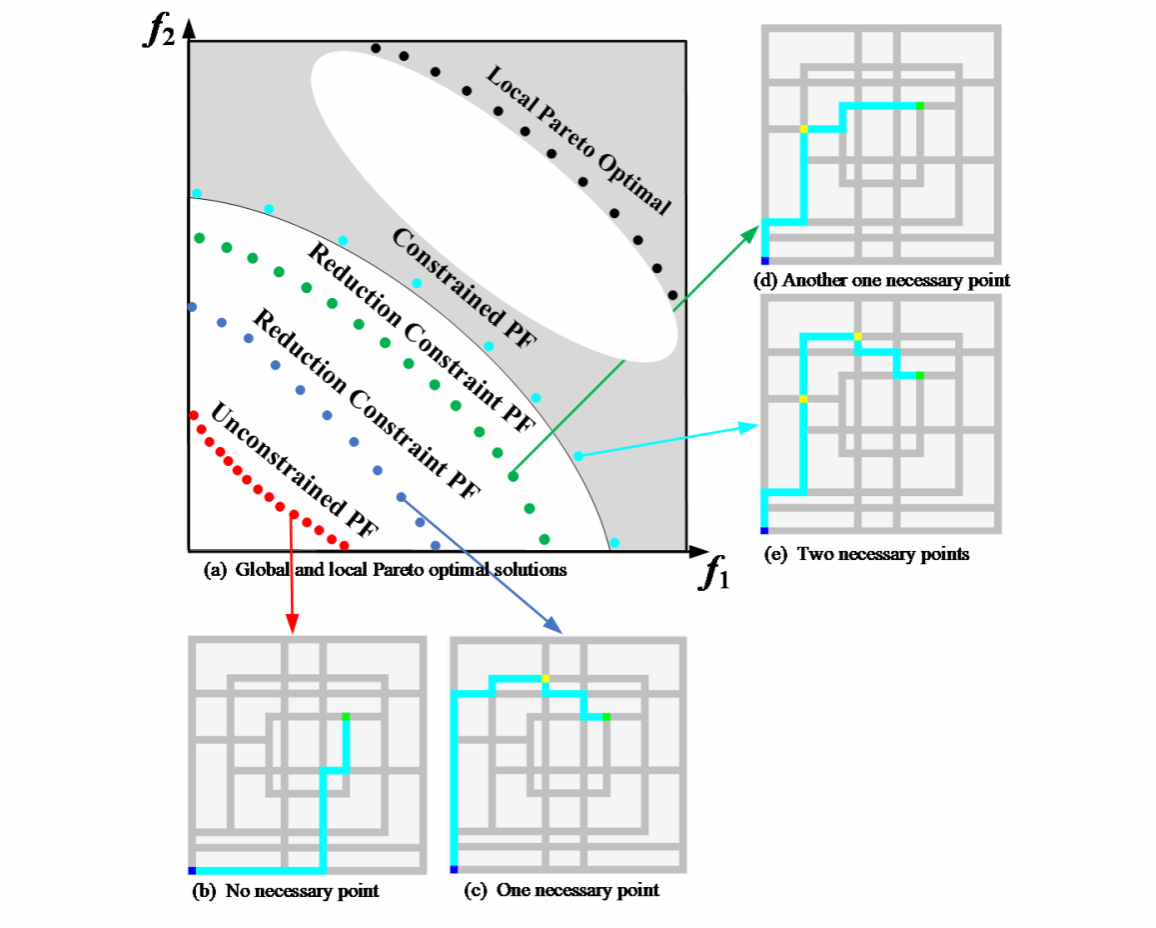
多目标多点最短路径规划问题(Multi-objective Multi-point Shortest Path Problem)广泛存在于物流调度、应急响应和智能交通等实际场景中。该类问题不仅涉及多个冲突的优化目标,还需路径同时满足多个必经点的约束,并在极端事件(如道路封闭、事故等)下具备鲁棒性和多样性。因此,其优化建模极具挑战性,尤其在面对大量等价解时,传统进化算法往往难以全面识别和保持这些多样解。
针对上述问题,许志伟博士团队提出了一种面向多模态多目标多点路径问题的进化算法MMOEA-CDP。该算法在两个关键技术上取得了创新性突破:
一是基于约束支配原则(Constraint Dominance Principle, CDP)的路径比较策略。该策略通过将每个必要点建模为独立约束,并引入约束满足度量机制,允许算法在进化过程中保留部分不可行但潜在优良解,有效穿越不可行区域,最终逼近真实的受约束帕累托前沿(Constrained Pareto Front)。
二是基于路径相似度的多模态解选择机制。该机制突破传统算法只关注目标空间多样性的限制,通过评估候选解在决策空间中的结构差异性,显著提升了算法保留等价最优路径(即在目标值相同但路径结构不同的方案)能力,从而为实际调度提供更多候选方案以应对突发情况。
在源自IEEE CEC 2021路径规划竞赛的真实城市交通图测试集上,MMOEA-CDP与五种国际先进算法进行了对比实验,涵盖多目标、多模态和受约束三类典型问题。在所有测试实例中,该算法均取得最优性能,尤其在等价最优解数量多达千级规模的测试问题上,能完整发现所有有效路径,验证了其在多目标路径规划中的卓越适应性与稳定性。
本研究成果不仅在理论上深化了对多模态多目标组合优化问题的理解,也为复杂交通网络中鲁棒路径规划提供了高效实用的新路径,具有重要的学术价值与应用前景。
据悉,《IEEE Transactions on Intelligent Transportation Systems》是智能交通系统领域的顶级国际期刊,由IEEE Intelligent Transportation Systems Society主办,具有广泛的国际影响力。许志伟博士团队长期致力于演化计算、智能交通调度及多目标优化等研究,近年来在相关方向上取得一系列突破性成果,多项成果发表于《IEEE Transactions on Evolutionary Computation》《IEEE Transactions on Cybernetics》等国际权威期刊,持续推动领域学术进步。